Otonom Uçuşta Devrim:
NexusV3 Uçuş Kontrolcüsü
GNSS'siz Ortamlarda Eşsiz Performans.
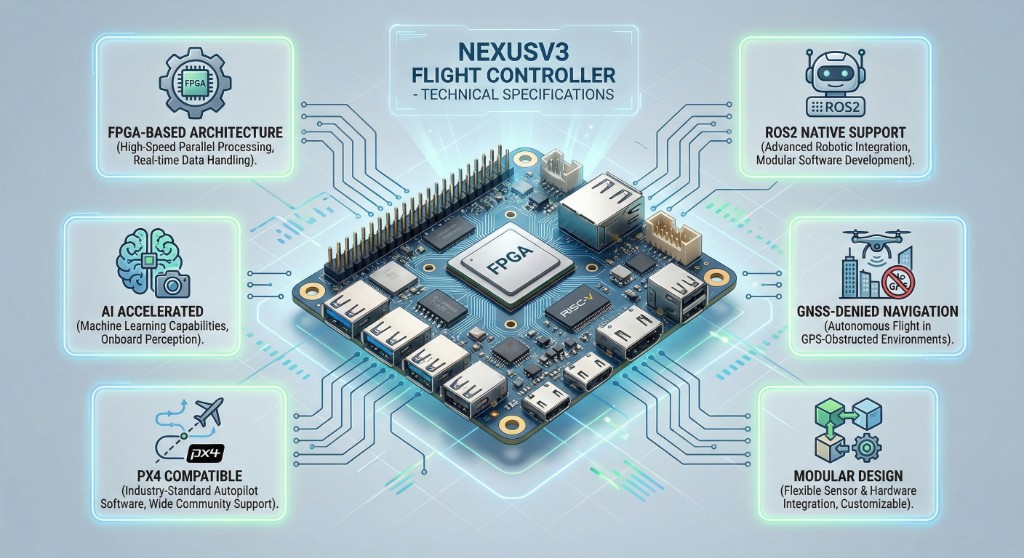
FPGA TABANLI MİMARİ
Yüksek Hızlı Paralel İşleme, Gerçek Zamanlı Veri Yönetimi.
AI HIZLANDIRILMIŞ
Yerleşik Makine Öğrenimi ve Algılama.
GNSS'SİZ NAVİGASYON
GPS Çalışmadığında Gerçek Otonomi.
ROS2 DOĞAL DESTEK
Gelişmiş Robotik Entegrasyon.
PX4 UYUMLU
Endüstri Standardı Otopilot Yazılımı.
MODÜLER TASARIM
Esnek ve Özelleştirilebilir.